Galileo vs. Newton
In a few previous tutorials, we briefly talked about physical properties, without really explaining the mathematics behind those concepts. This tutorial tries to remedy that situation. In what follows, space is three-dimensional and Euclidean, and time is one-dimensional. The goal of this tutorial is to define and investigate the structure of space-time and the corresponding group of transformations, and to analyze the constraints imposed by Galileo’s principle of relativity on Newton’s equation of motion.
Galileo’s Principle of Relativity
In the tutorial about Newton’s three laws of motion, Galileo’s principle of relativity was briefly mentioned when the concept of an inertial frame of reference was explained. Galileo stated that there exist coordinate systems, called inertial frames of reference, possessing the following two properties:
- All the laws of nature are the same in all inertial coordinate systems, at all moments of time.
- All coordinate systems in uniform rectilinear motion, regarding an inertial one, are themselves inertial.
In other words, as seen in the example in the previous tutorial, if a coordinate system attached to the earth is inertial, then it is impossible to detect the motion of the train, which is moving uniformly in a straight line, by experiments conducted entirely inside the cars of the train.
Newton’s Principle of Determinacy
In this tutorial about kinematics it was mentioned, that Newton determined that the initial state of a mechanical system, i.e. knowing the initial positions and velocities of the objects in the system, uniquely determine the motion of the system.
In what follows, we try to bring those two concepts together. To do so, we must first define the space we live in.
A Space of Time
Let
In other words, an affine space is a principal homogenous space, or a torsor, for the action of the additive group of the vector space as defined above, which means that the stabilizer subgroup of every point is trivial. Equivalently, this means that the vector space acts freely and transitively on the affine space.
Further, let the vector space be equipped with a positive definite symmetric bilinear form
Galilean Structure
To model physical phenomena, one often gives them a home in a Galilean space-time structure. This structure consists of three components.
The Universe
The actual universe is a four-dimensional affine space
Time
Time is defined as a linear map
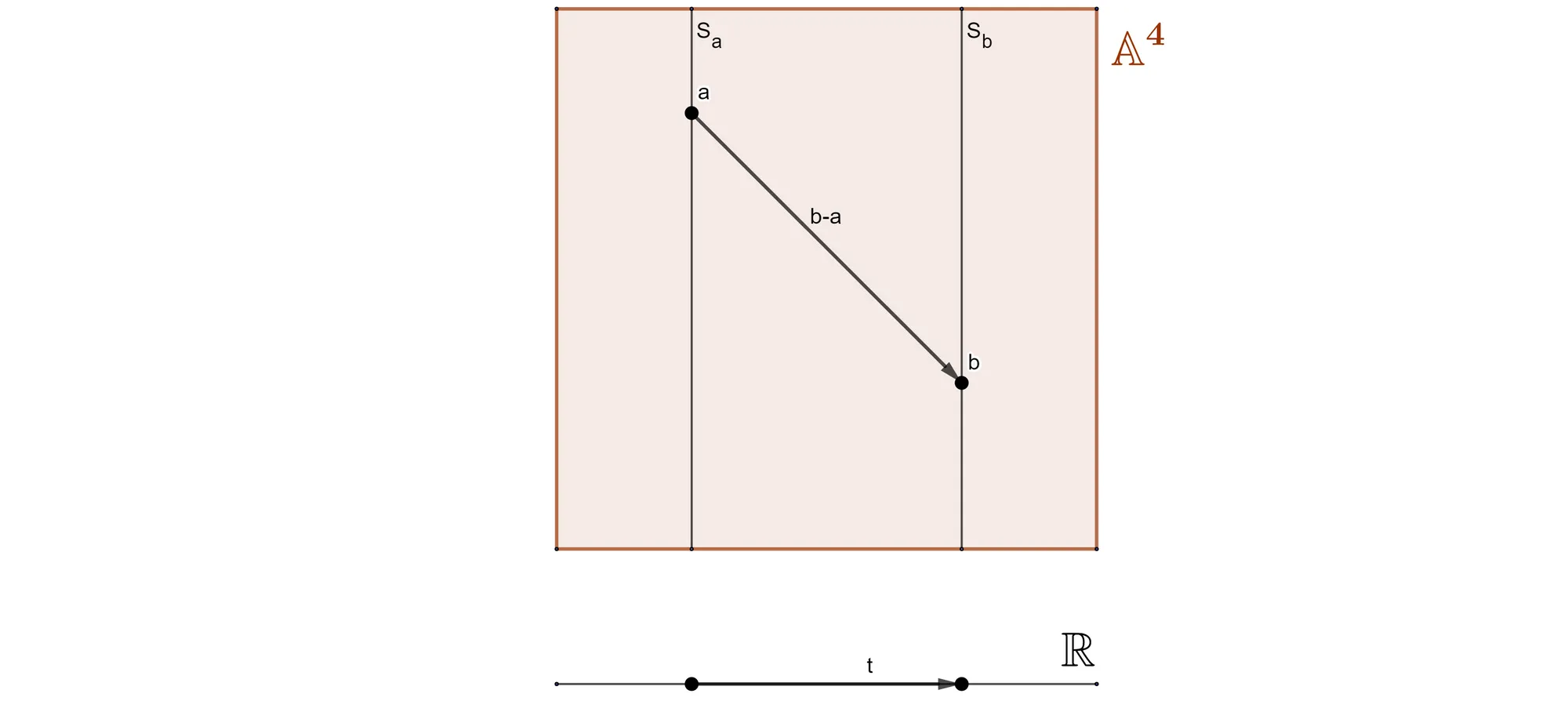
Distance
The distance between simultaneous events
An affine space
The standard Galilean coordinate space is the space
A uniform motion with velocity
Translations by a fixed vector
A rotation of the coordinate axes looks like this:
Since the standard Galilean coordinate space is easy to work with, it would be desirable for all other Galilean spaces
to be isomorphic to
The Equation of Motion
A motion in an
The derivative
The second derivative
In what follows, all functions are continuously differentiable as many times as necessary.
The movement of
As seen before, according to Newton, all motions of a system are uniquely determined by their initial positions and
velocities. In particular, the initial configuration of a system uniquely determines the acceleration, that is, there
exists a function
Note that in the previous tutorials the motion of a single object, thus the case
Galilean Invariance
Since under Galileo’s principle of relativity the transformation of the world lines of a given system define new world lines of the same system with new initial conditions, several conditions are imposed on Newton’s equation of motion.
Time Invariance
One of the three possible Galilean Transformations was a time translation, or a uniform movement. Invariance under a
time translation means that the laws of nature must be true at any moment in time, which means that if
It follows that, in an inertial frame of reference, or an inertial coordinate system, the function
Translation Invariance
A second possible Galilean Transformation was the simple translation. Invariance regarding a translation means that the
space must be homogenous. More precisely, this means that if
It follows that the right-hand side of the equation of motion in an inertial frame of reference does not depend on the
choice of a coordinate system, i.e. it does not matter which point is taken as the considered origin of the affine
space, i.e. it is possible to work with an affine basis. Further, using the invariance with respect to time, Newton’s
equation of motion in an inertial frame of reference can be rewritten as:
Rotational Invariance
The last Galilean transformation to consider is the rotation in three-dimensional space. Invariance regarding such
rotations means that the space is isotropic, which means uniform in all orientations. The word isotropy is derived
from the two Greek words isos (ἴσος), meaning equal, and tropos (τρόπος), meaning way, thus, basically speaking,
rotational invariance means that all directions are the same. If
In other words, invariance with respect to an orthogonal map means just that, invariance under an orthogonal map:
Law of Inertia
In a mechanical system consisting of only one point, the acceleration in an inertial coordinate system is zero. As there
is only one point in motion, the equation of motion can be written as
References
- Differential Equations, by Prof. Dr. K.-F. Siburg
- Dynamical Systems, by Prof. Dr. K.-F. Siburg
- Geogebra
- Wikipedia