Collision Geometry - Review
The most important geometrical objects in Flatland are lines, rays, line segments, rectangles, spheres, and polygons.
During the last few tutorials, we learned how to use most of these geometrical objects to do collision detection. In this tutorial, we will give a mathematically sound review of the concepts used in those previous tutorials and explain how to use them in a game project.
Rays and Line Segments
The tutorial about basic line intersection used an ad hoc approach to lines and line segments. We now want to define those ideas a bit more rigorously.
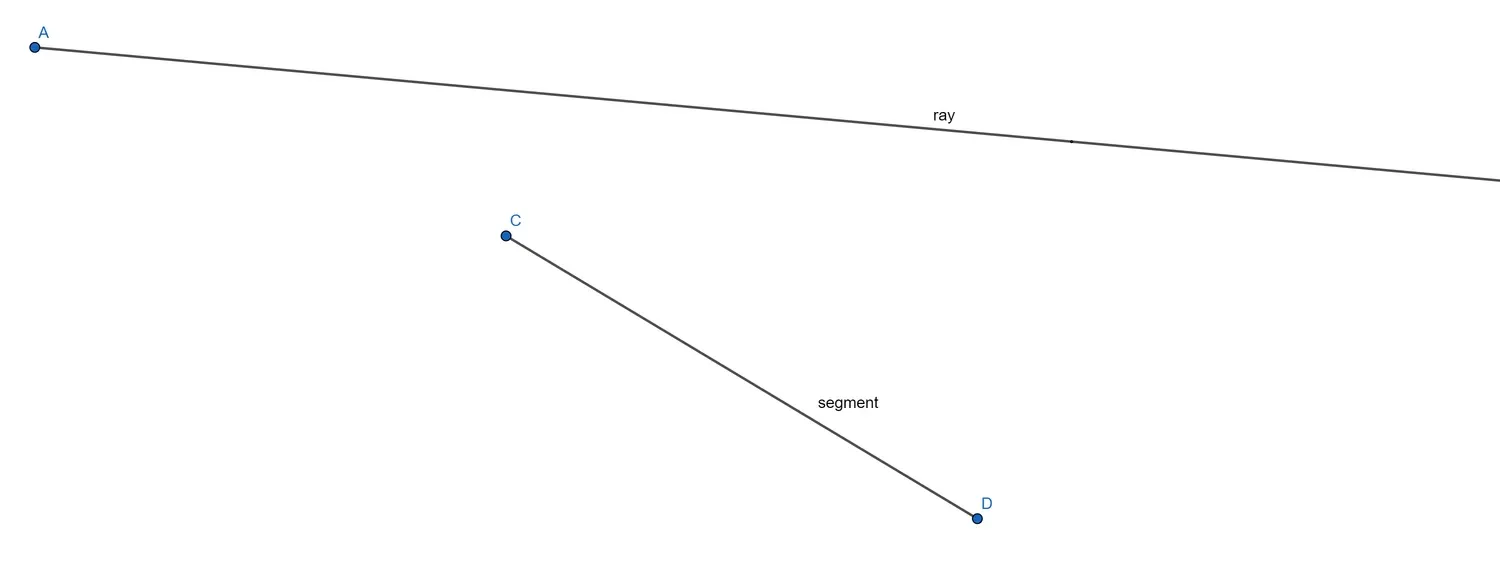
A ray starts at a specific point, its point of origin, and extends infinitely in a specified direction. To work with rays in games, it is useful to represent them by parametric functions. Let
For
A line segment is a ray with an end point, that is, a line segment actually stops somewhere. A line segment can be represented using the same function definition, but with a closed interval as its domain:
Now, as before, for
Knowing the point of origin
To store rays and line segments in C++, a simple structure is sufficient:
class Ray2D{public: mathematics::linearAlgebra::Vector2F startPoint; // the point of origin mathematics::linearAlgebra::Vector2F direction; // the direction of the ray
Ray2D(); // creates an "empty" ray, starting at (0,0) and pointing to (1,0) Ray2D(const mathematics::linearAlgebra::Vector2F& origin, const mathematics::linearAlgebra::Vector2F& direction); // creates a ray with point of origin and direction
// ride the ray mathematics::linearAlgebra::Vector2F ride(const float t) const; // returns the point on the ray after tracing the ray for t amounts of time};
class LineSegment2D{public: mathematics::linearAlgebra::Vector2F startPoint, endPoint; // the start and ending point of the line segment mathematics::linearAlgebra::Vector2F directionVector; // the vector joining those two points mathematics::linearAlgebra::Vector2F normalVector; // the normal vector of the line segment
LineSegment2D(mathematics::linearAlgebra::Vector2F startPoint, mathematics::linearAlgebra::Vector2F endPoint); LineSegment2D(mathematics::linearAlgebra::Vector2F startPoint, mathematics::linearAlgebra::Vector2F endPoint, mathematics::linearAlgebra::Vector2F normalVector);};The ride function returns the point on the ray or line segment after riding along on the ray or line segment for a specified amount of time.
In addition to the starting and end point, the line segment structure also computes the normal of the segment, in counter-clockwise order.
Bounding Spheres
The tutorial about basic collision detection introduced bounding spheres. A sphere can be defined by two variables — a vector representing the centre of the sphere,
class Sphere2D{public: mathematics::linearAlgebra::Vector2F center; // the center of the sphere float radius; // the radius of the sphere
Sphere2D(); // creates the unit sphere (center: (0,0) - radius: 1) Sphere2D(const mathematics::linearAlgebra::Vector2F& c, const float r); // creates a sphere with radius r and center c
mathematics::linearAlgebra::Vector2F point(const float angle); // returns the coordinates of a point on the circle defined by the angle (between 0 and 2Pi)};The point function returns the coordinates of a point on the circle defined by a specific angle (between 0 and
where

Bounding Boxes
The same tutorial introduced bounding boxes, or more precisely, axis-aligned bounding boxes, also called AABBs. Those boxes can be represented by two points, the upper-left and the lower-right point:
class Rectangle2D{public: mathematics::linearAlgebra::Vector2F upperLeft; // the upper left corner of the rectangle mathematics::linearAlgebra::Vector2F lowerRight; // the lower right corner of the rectangle
Rectangle2D(); // the standard constructor constructs the unit rectangle with the upper left corner glued to (0,0) Rectangle2D(const mathematics::linearAlgebra::Vector2F& up, const mathematics::linearAlgebra::Vector2F& lr); // creates a rectangle with the specified extremeties};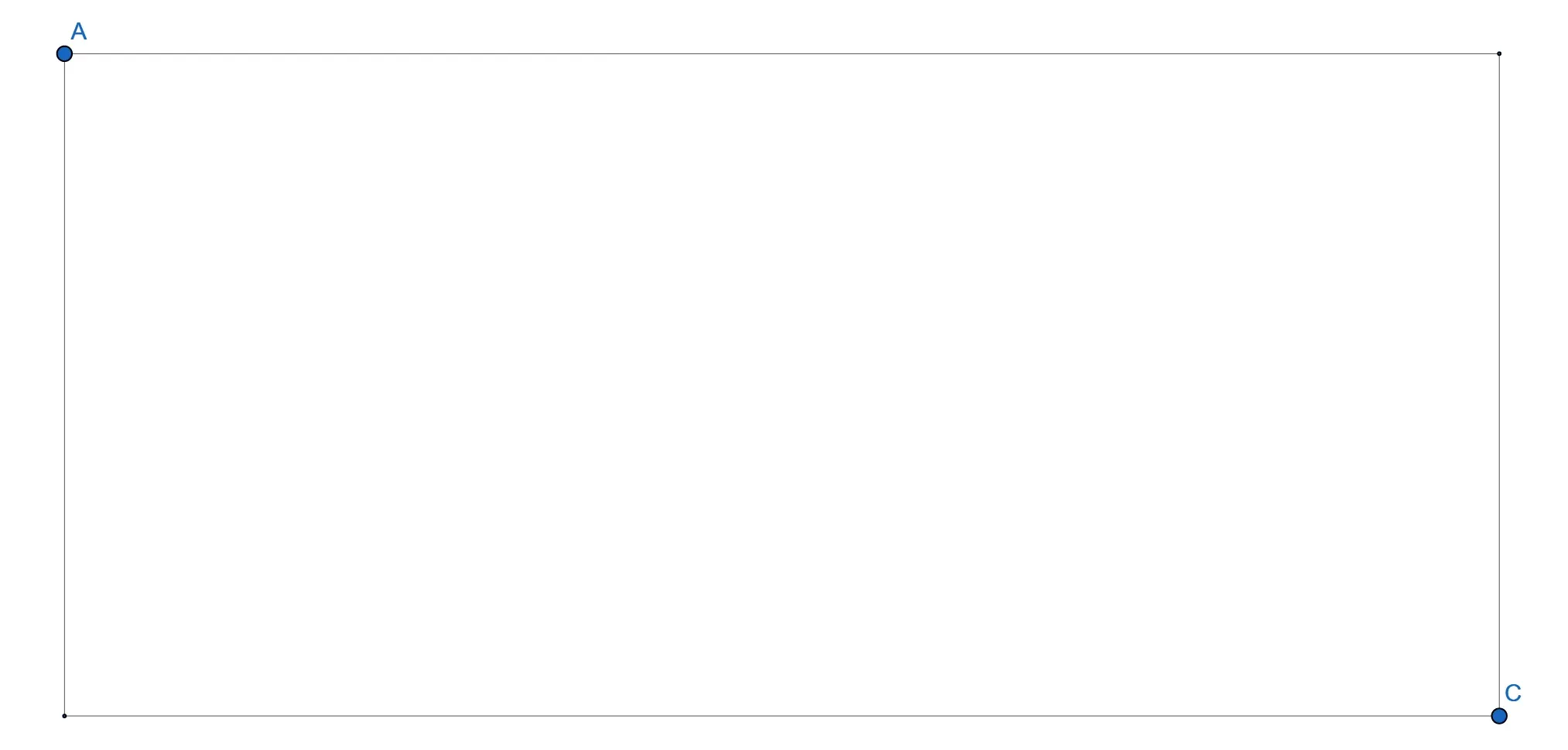
To increase accuracy, one could ditch the requirement for axis parallelity. Unfortunately, the price for increased accuracy is a far more complicated collision detection test. We will thus postpone the discussion of those bounding boxes to a later time.
What we could do, however, is to use capsules, for example, to define bounding boxes around humanoids. A capsule is a cylinder in 2D, with two hemispheres attached to the top and bottom, or a rounded rectangle.

To define such a capsule, a line segment and a radius are needed:
class Capsule2D{public: LineSegment2D lineSegment; // the line segment defining the capsule float radius; // radius of the circles on each edge
Capsule2D(); // defines a capsule with segment from (0,0) to (0,1) and radius 0.5f Capsule2D(const LineSegment2D& ls, const float r); // defines a capsule with a specified line segment and radius Capsule2D(const mathematics::linearAlgebra::Vector2F& startPoint, const mathematics::linearAlgebra::Vector2F& endPoint, const float r);};Polygons
Another important geometrical object are polygons. The word polygon is derived from the Greek words ολύς, or polýs, which means many, and γωνία, or gōnía, which means angle. A polygon is thus an object with many points or angles.
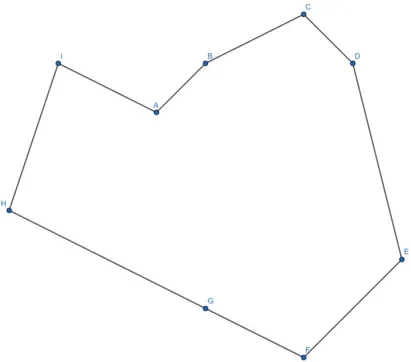
To work with polygons, it is sufficient to store all its vertices and to compute its centroid:
class Polygon2D { public: std::vector<mathematics::linearAlgebra::Vector2F> vertices; // the vertices of the polygon mathematics::linearAlgebra::Vector2F centroid; // the centroid of the polygon
Polygon2D(); // creates an empty polygon Polygon2D(const std::vector<mathematics::linearAlgebra::Vector2F>& v, const mathematics::linearAlgebra::Vector2F& c); // creates a polygon with a specified list of vertices, the vertices should be given in counter-clockwise order, and a specified centroid Polygon2D(const std::vector<mathematics::linearAlgebra::Vector2F>& v); // creates a polygon with a given set of vertices (should be given in counter-clockwise order), the centroid is computed automatically };Please note that for the moment, only convex polygons are supported.
The bell0bytes game engine provides all of those classes in the mathematics::geometry namespace. You can download the source code here.
References
- Game Programming Algorithms and Techniques, by S. Madhav
- Tricks of the Windows Programming Gurus, by A. LaMothe
- Wikipedia