Basic Projectile Kinematics
La parole est un projectile qui tue à distance.
— Adolphe d’Houdetot, Dix épines pour une fleur.
It is time to apply the independence of vertical and horizontal motion to strengthen the power of our military! It is time to launch our first projectiles.
Let
Basic Equations
A projectile is an object that is launched into motion and then allowed to follow a path determined solely by the influence of gravity. Air resistance and the Earth’s rotation are ignored for the moment.
To simulate projectile motion, the equations of motion of the previous chapter can be used. Since gravity only adds
negative vertical acceleration, the acceleration vector can be set to
Launch Angle
To simplify the computations, the launch site of the projectile is always set to the centre of the coordinate system.
The figure below shows a projectile being launched with an initial velocity 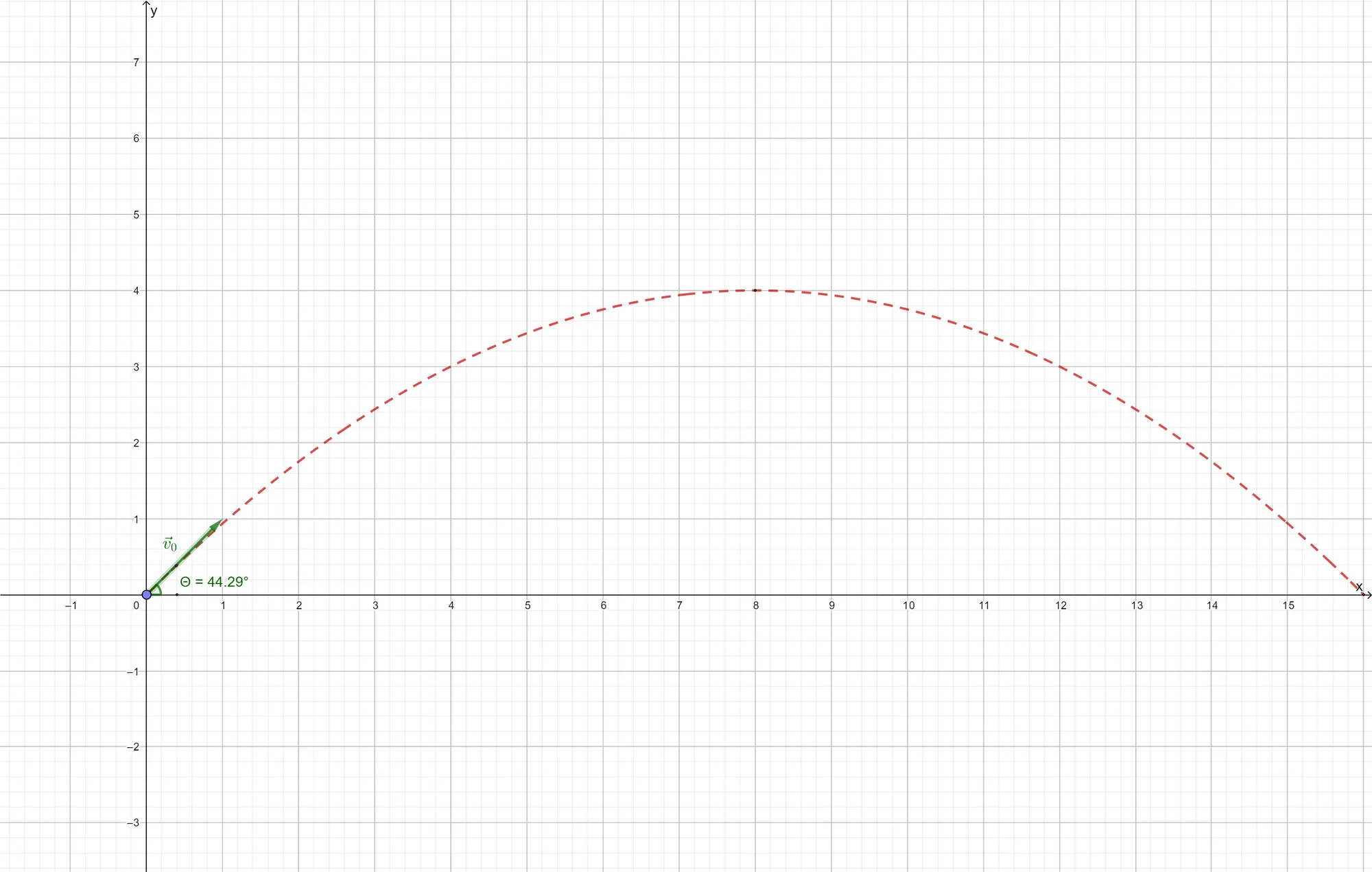
Since the projectile starts at the origin of the coordinate system, its initial position is
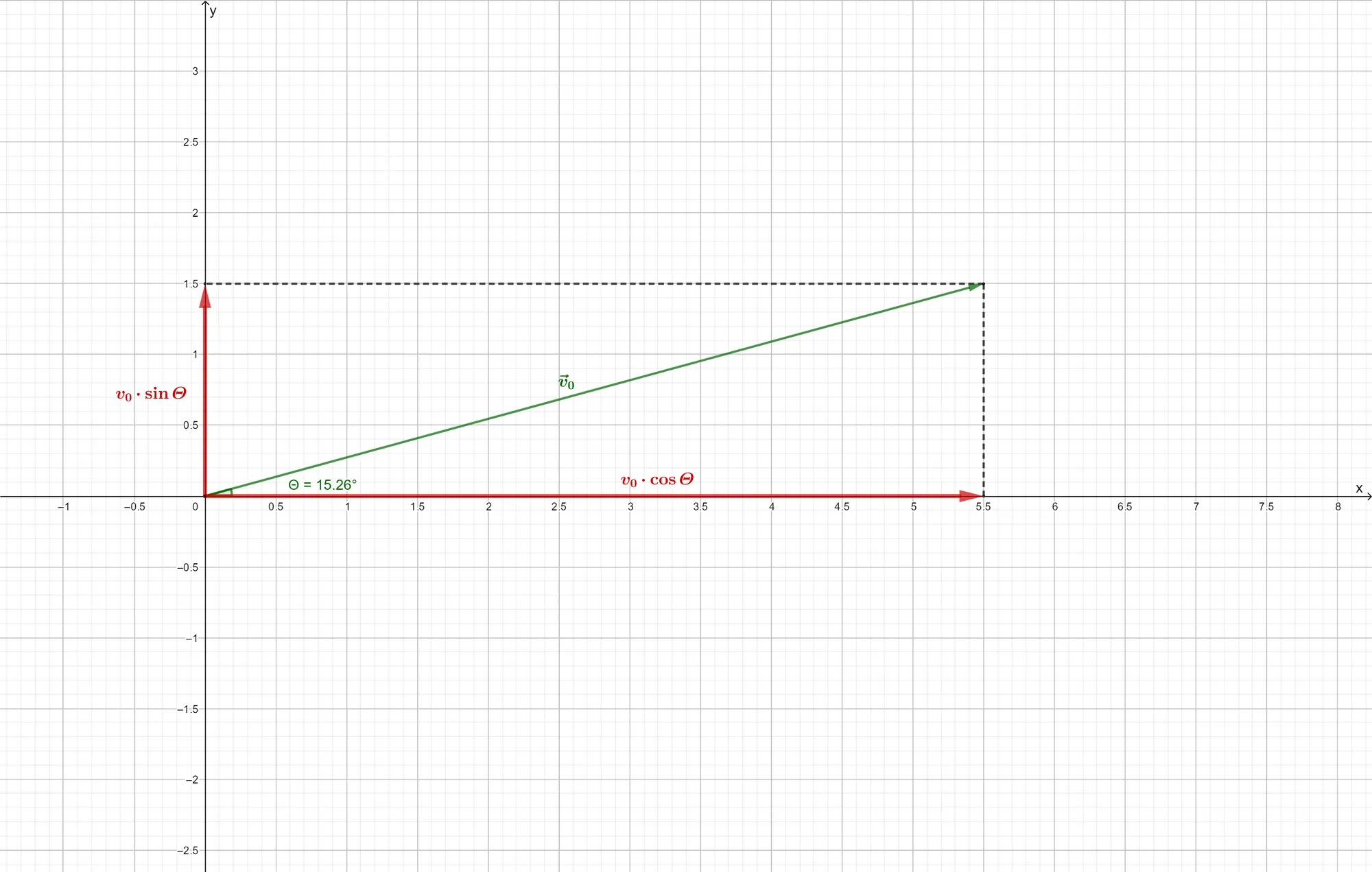
The launch angle of the projectile is
Using this new idea, the equations of motion for a projectile launched with an initial speed
where
We will only discuss frictional forces in later tutorials, but just as an idea, to add, for example, a small wind force,
slowing down a bullet, a small negative vertical acceleration
Key Characteristics
To complete this rather short tutorial, some key characteristics of projectile movement are briefly explained.
Height, Range and Time
The total time
If the projectile is instead launched from a launch site located at
which, for
The peak
The range
for a projectile launched at an initial height of
Note that the range depends inversely on the acceleration of gravity, thus the smaller the gravity, the larger the
range; this means that a projectile launched on the Moon, where the acceleration of gravity is about
As the range varies with the double of the initial launch angle, the maximal reach can be obtained by using a launch
angle of
Symmetrical Range
When wondering at what range to shoot a projectile, the following symmetry might be handy. Under ideal conditions (no
air resistance), the maximal range is obtained by a launch angle of
Angle of Reach
Given a distance
Angle to Hit
To hit a target located at a point
If the roots are imaginary, then the initial speed of the projectile was not fast enough to reach the desired target.
The case where both roots are the same is very intriguing, as it defines the angle that allows for the lowest launch
speed. For that to happen, the value under the square root must be zero, thus the solutions to the equation
Those solutions are
In other words, to be able to use the lowest possible launch speed, the launch angle should be chosen as the arctangent
of the ratio of the elevation of the target over the distance of the target, plus
Symmetrical Velocity
Note that when a projectile hits the ground, its velocity in the
Implementation
Implementing projectile movement can once again be done using the symplectic integrator from the previous chapters.
To facilitate working with projectiles, I created a new class called Projectile:
class Projectile{private: // key characteristics float launchSpeed; // launch speed in pixels per second float launchAngle; // launch angle in degree float gravity; // acceleration of gravity in pixels per second float range; // range in pixels float peak; // peak in pixels float timeOfFleight; // in seconds
// update mathematics::Vector2F position; // the current position of the projectile (in pixels) mathematics::Vector2F velocity; // the current velocity of the projectile (in pixels per second) mathematics::Vector2F acceleration; // the current acceleration of the projectile (in pixels per seconds squared)
// recompute initial velocity and key characteristics void computeInitialVelocityAndKeyCharacteristics();
public: // constructor Projectile(const float launchSpeed, const float launchAngle, const float launchX = 0.0f, const float launchY = 0.0f, const float gravity = 9.81f, const float frictionX = 0.0f);
// update and farseer void update(const double dt); // updates the position of the projectile - uses semi-implicit Euler integration
// recalibrate projectile void setLaunchAngle(const float angle); void reduceLaunchAngle(); void increaseLaunchAngle(); void reduceLaunchSpeed(); void increaseLaunchSpeed(); void increaseGravity(); void decreaseGravity();
// getters float getPositionX() const { return position.x; }; float getPositionY() const { return position.y; }; float getRange() const { return range; }; float getVelocityX() const { return velocity.x; }; float getVelocityY() const { return velocity.y; }; float getMovementDirection() const;};The constructor simply sets the initial values:
Projectile::Projectile(const float launchSpeed, const float launchAngle, const float launchX, const float launchY, const float gravity, const float frictionX) : launchSpeed(launchSpeed), launchAngle(launchAngle), gravity(gravity){ // set starting position position.x = launchX; position.y = launchY;
// set initial acceleration acceleration.x = -frictionX; acceleration.y = this->gravity;
// compute initial velocity computeInitialVelocityAndKeyCharacteristics();}The key characteristics are computed as explained above:
// compute initial velocity and key characteristicsvoid Projectile::computeInitialVelocityAndKeyCharacteristics(){ // get launch angle in radians float launchAngleRad = ((float)M_PI / 180)*launchAngle;
// compute starting velocity float cosAngle = std::cosf(launchAngleRad); float sinAngle = std::sinf(launchAngleRad); velocity.x = launchSpeed * cosAngle; velocity.y = -launchSpeed * sinAngle;
// calculate characteristics if (position.x == 0 && position.y == 1080) { // starting position is at the lower left of the screen timeOfFleight = (2 * launchSpeed / gravity)*sinAngle; range = (launchSpeed*launchSpeed / gravity) * 2 * sinAngle*cosAngle; } else { timeOfFleight = (launchSpeed*sinAngle + std::sqrtf(launchSpeed*launchSpeed*sinAngle*sinAngle + 2 * gravity*position.y)) / gravity; range = (launchSpeed*launchSpeed*std::sinf(2 * launchAngleRad)) / (2 * gravity) * (1 + std::sqrtf(1 + (2 * gravity*position.y) / (launchSpeed*launchSpeed*sinAngle*sinAngle))); }
peak = (launchSpeed * launchSpeed * sinAngle * sinAngle) / (2 * gravity);}To update the position of a projectile, the symplectic Euler integrator is used once again:
// update positionvoid Projectile::update(const double dt){ // update the position and velocity of the projectile using semi-implicit Euler integration Kinematics::semiImplicitEuler(position, velocity, acceleration, dt);}To use the class, simply create a projectile and launch it. Here is the code for the rendering function of a little demo I created:
util::Expected<void> PlayState::render(const double farSeer){ // render preview for the current projectile dxApp.getGraphicsComponent().get2DComponent().drawEllipse(currentProjectile->getPositionX(), currentProjectile->getPositionY(), 5.0f, 1.2f); dxApp.getGraphicsComponent().get2DComponent().drawEllipse(currentProjectile->getRange(), 1080, 5.0f, 5.0f);
// render projectiles for (unsigned int i = 0; i < projectiles.size(); i++) { // render landing zone dxApp.getGraphicsComponent().get2DComponent().fillEllipse(projectiles[i].getRange(), 1080, 5.0f, 5.0f);
// render projectile dxApp.getGraphicsComponent().get2DComponent().setRotationMatrix(projectiles[i].getMovementDirection(), projectiles[i].getPositionX(), projectiles[i].getPositionY()); dxApp.getGraphicsComponent().get2DComponent().drawEllipse(projectiles[i].getPositionX() + projectiles[i].getVelocityX()*farSeer*dxApp.getPhysicsDeltaTime(), projectiles[i].getPositionY() + projectiles[i].getVelocityY()*farSeer*dxApp.getPhysicsDeltaTime(), 25.0f, 2.5f); dxApp.getGraphicsComponent().resetTransformation(); }
// print FPS information dxApp.getGraphicsComponent().getWriteComponent().printFPS();
// return success return { };}Note that in order for the ellipses to point in the direction of movement, a rotation matrix is set using a formula
from the previous tutorial on two-dimensional motion:
Furthermore, the far seer is used to guess the position of a projectile, if there is some time left over that could not be processed during the update of the game world. If you can’t recall why exactly we use a far seer in our game loop, reread the following tutorial on the game loop. Basically, to make sure we can simulate our mathematical and physical world with as much precision as possible, a fixed time step is used to do numerical integration, for example, yet sporadically, there is still some unprocessed time left over, and the renderer then makes an educated as to where the projectile should be drawn.
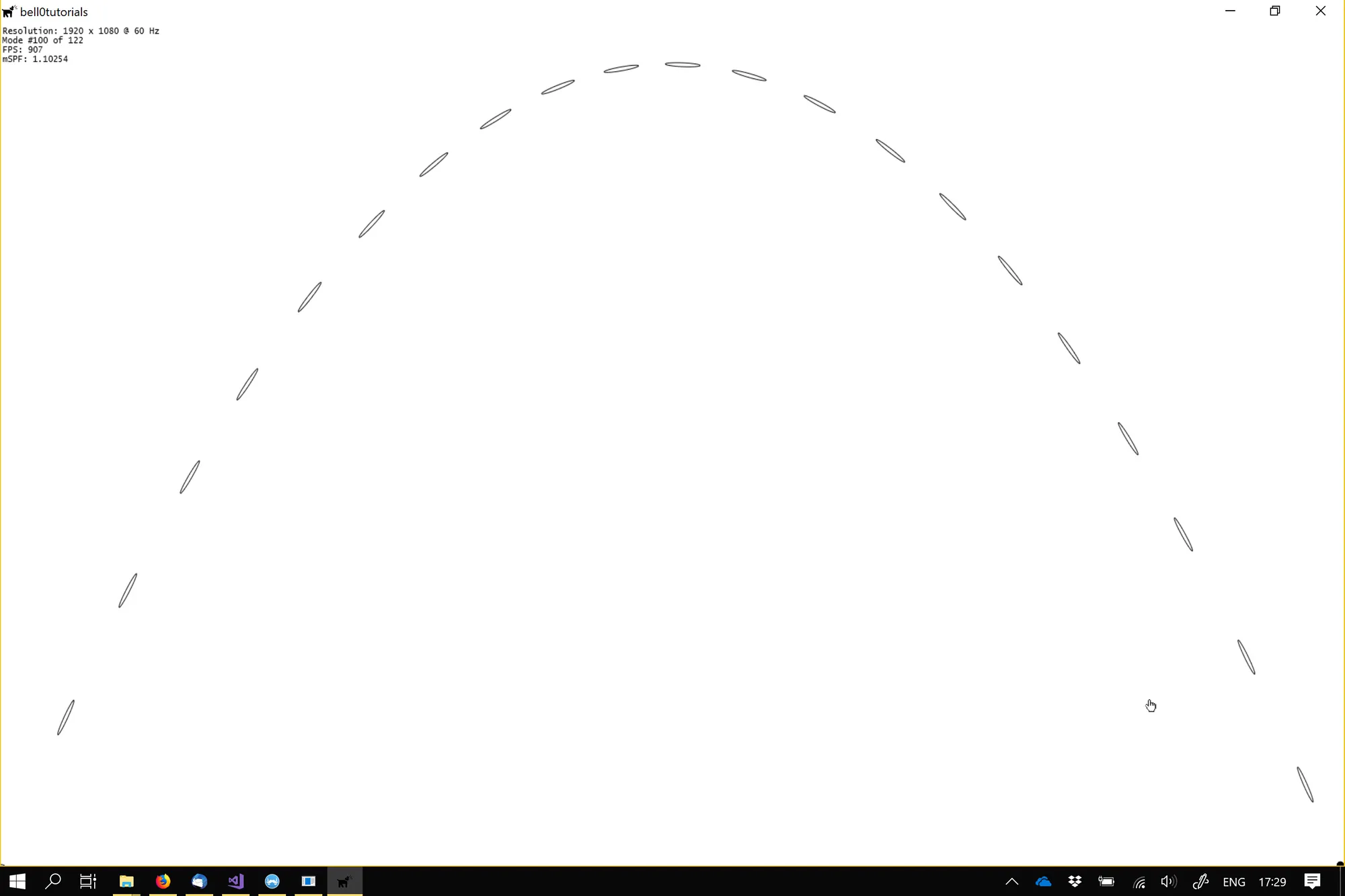
The entire source code can be downloaded from here. In the demo, use the arrow keys to change the launch angle (left and right arrow keys) as well as the launch velocity ( up and down arrow keys). The acceleration of gravity can be changed by pressing A or Q.
In the next tutorial, we will learn about Newton’s laws of motion. For now though, enjoy the missile barrage!
References
- Geogebra
- Physics, by James S. Walker
- Tricks of the Windows Programming Gurus, by A. LaMothe
- Wikipedia